

Частотный преобразователь – устройство, предназначенное для регулирования скорости (частоты вращения) электродвигателя. Использование частотного преобразователя дает возможность плавно менять скорость вращения ротора, как увеличивая ее, так и уменьшая по сравнению с номинальной.
В современной промышленности применение частотных преобразователей получило широкое распространение. Данный метод позволяет гарантировать стабильную работу мотора в различных условиях. Сегодня частотные преобразователи представляют собой высокотехнологичные решения, отличающиеся высокой надежностью и обладающие широким набором возможностей. Они применяются для управления асинхронными электромоторами, приводящими в действие такое оборудование, как насосы, транспортеры, вентиляторы и многое другое.
Преимущества частотных преобразователей

Ключевым преимуществом частотного преобразователя является возможность замены привода постоянного тока. Работая в паре с асинхронным мотором, преобразователь частоты подменяет собой последний, что дает весомые плюсы при эксплуатации, так как привод постоянного тока – наиболее слабое звено в системе регулирования скорости вращения. Такой электропривод обладает низкой надежностью. Щетки, являющиеся частью его конструкции, имеют обыкновение искрить, что не только создает угрозу безопасности, но и ускоряет износ. Приводы постоянного тока запрещено использовать в сильно запыленных помещениях и там, где имеется значительная концентрация взрывоопасных газов в воздухе. Наконец, стоимость такого привода достаточно высока.
Асинхронный электромотор с частотным регулятором имеет следующие преимущества:
- более простая конструкция,
- доступная стоимость,
- надежность, обусловленная отсутствием подвижных контактов,
- долгий срок службы,
- компактность и простота в установке при аналогичной мощности,
- меньший вес.
Асинхронные электродвигатели достаточно просты в производстве и неприхотливы в техническом обслуживании. Что касается недостатков – основным из них остается трудность в обеспечении изменения скорости в рабочем режиме. К сожалению, асинхронный двигатель не позволяет использовать классическое решение этой проблемы (изменять напряжение с помощью дополнительных сопротивлений в обмоточной цепи). На помощь в данном случае приходят частотные регуляторы.
Несмотря на то, что теоретические принципы такого регулирования были разработаны почти 100 лет назад, реализовать их на практике удалось относительно недавно. Главной причиной, препятствовавшей такой реализации, оставалась высокая стоимость производства асинхронных моторов с преобразователями частоты и их малая востребованность на рынке.
Однако появление электрическим схем, включающих в себя IGBT-транзисторы (также известные как биполярные транзисторы с изолированным затвором или производительные микропроцессорные системы), позволило в корне изменить ситуацию. Европейские и американские производители сумели сохранить все преимущества частотных преобразователей, снизив при этом их стоимость. С этого момента преобразователи частоты получили широкую популярность.
Типы управления
Сегодня на рынке имеется несколько типов частотных преобразователей. Само управление асинхронным двигателем может производиться по-разному, но наиболее популярным является метод векторного регулирования.
Тип регулирования с использованием преобразователя частоты напрямую зависит от того, к какому классу данный преобразователь относится. Все частотные регуляторы можно разделить на ряд подклассов. Группировка возможна по следующим признакам:
- способ управления – автоматическое или ручное регулирование,
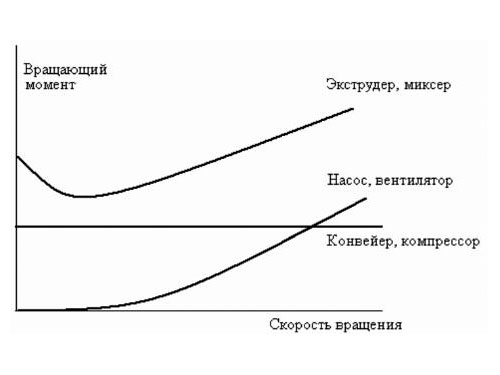
- вид выходной нагрузки – по этому признаку все регуляторы частоты делятся на механизмы для электромоторов общепромышленного назначения, для приводов вентиляторов и насосов, а также для тех двигателей, которые предназначены для работы в условиях регулярных перегрузок.
-
Новейшие преобразователи частоты также отличаются друг от друга имеющимся функционалом. Помимо различных типов управления (ручное и автоматическое), они могут иметь потенциометр и быть оснащены системой настройки диапазона выходных частот (в пределах от 0 до 800 Гц).
Новейшие преобразователи частоты также отличаются друг от друга имеющимся функционалом. Помимо различных типов управления (ручное и автоматическое), они могут иметь потенциометр и быть оснащены системой настройки диапазона выходных частот (в пределах от 0 до 800 Гц).
Принцип действия
Рассмотрим далее принцип действия частотных преобразователей.
Основные задачи, которые решает преобразователь частоты, следующие:
- автоматическое изменение скорости вращения электромотора путем обработки сигналов от периферийных датчиков,
- запуск привода согласно заданным настройкам,
- автоматическое поддержание заданных рабочих характеристик и восстановление настроек в случае сбоев в подаче электроэнергии,
- удаленное управление (при помощи пульта),
- защита мотора от перегрузки.
Нижеприведенная формула описывает принцип частотного регулирования асинхронного электромотора:
Смысл данного принципа следующий. Изменяя частоту входного напряжения, можно также изменять и угловую скорость магнитного поля статора. Количество пар полюсов при этом остается неизменным. Данный способ позволяет добиваться оптимальных рабочих параметров электромотора. Кроме того, асинхронный двигатель с частотным преобразователем имеет и оптимальные показатели частотного регулирования, а именно:
- плавная регулировка скоростей в широком диапазоне,
- высокая жесткость механических показателей,
- регулировка частоты вращения вала при сохранении уровня скольжения и с минимальными потерями мощности.
Что касается условий, при которых возможно частотное регулирование асинхронного мотора, то здесь ключевым становится одновременное изменение напряжения с частотой вращения. Это необходимо для того, чтобы повысить энергетические характеристики двигателя, такие как КПД, устойчивость к перегрузкам, коэффициент мощности и др.
Учитываемые технические параметры
Следующие технические характеристики обязательно должны быть учтены при подборе частотного преобразователя как влияющие на работу двигателя:
- диапазон изменений – это те пределы, в которых возможно регулирование. Диапазон изменений рассчитывается как соотношение минимальной и максимальной частот вращения.
- Уровень плавности регулирования – данный параметр рассчитывается с учетом минимального скачка частоты вращения вала при смене механических характеристик.
- Направление изменения вращения, или зона регулировки. При использовании частотного преобразователя изменяются и характеристики электромотора, свойственные ему в номинальных рабочих условиях. Двигатель с частотным преобразователем имеет другие характеристики, которые отличаются от стандартных.
Основные правила частотного регулирования
Максимум новой частоты при использовании преобразователя определяется ее механическими качествами. Чем выше новая частота вращения, тем лучше энергетические характеристики асинхронного мотора. В связи с этим при использовании схем с редуктором есть смысл выполнять регулирование с изменением частоты в обоих направлениях (вверх и вниз).
Также необходимо иметь в виду следующее. При ускорении вращения (относительно номинальной скорости) частота источника тока не должна превышать номинальную более чем вдвое.
Частотное регулирование асинхронных моторов оправдывает себя в том числе и в системах с короткозамкнутым ротором. В данном случае отсутствие скольжения позволяет свести к минимуму потери мощности, а выходные механические характеристики сохраняют высокую жесткость.
Преимущества электромоторов с частотным регулированием
Ключевое преимущество – высокий опрокидывающий момент, который позволяет гарантировать стабильную эксплуатацию электродвигателя и всего подключенного оборудования в самом широком частотном диапазоне.
Таким образом, использование электромоторов с частотными преобразователями дает возможность исключить из схемы ряд механизмов, снижающих мощность, и получить, таким образом, высокий КПД.
Принципы регулирования частоты
Частотное регулирование в электромоторах переменного тока основано на принципе связи между угловой скоростью, характеризующей вращение поля статора, и частотой питающего напряжения. Таким образом, изменение частотных параметров напряжения влечет за собой изменения и угловой скорости.
Последняя величина может быть выражена следующей формулой:
ω0 = 2πf1/р,
в которой f1 — частота напряжения, питающего обмотку статора, р — количество полюсных пар в обмотке статора.
Из данного соотношения следует, что при изменении частоты питающего напряжения появляется возможность изменения и угловой скорости. А это, в свою очередь, повлечет за собой изменение частоты вращения ротора в моторе.
Описанный выше принцип дает возможность использовать в современных приводах высокотехнологичные, но при этом весьма простые и надежные асинхронные электромоторы с короткозамкнутым ротором. Высокие технические характеристики таких моторов и, в особенности, систем с частотными преобразователями обусловили их широкое распространение.